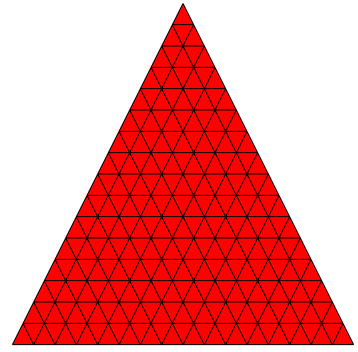
1) Usando o código da junta de Sierpinski, desenhe o quarto triângulo em vermelho e as bordas de todos os triângulos em preto. Adicione um slider para especificar o nível de subdivisão.
Junta de Sierpinski. |
1b) Adicione os requisitos do primeiro trabalho do Cousera
2) Desenhe um cubo em 3D e faça-o girar, no seu próprio sistema de
coordenadas, em torno de um seus três eixos: x, y ou z.
Utilize o teclado ou um checkbox para selecionar o eixo de rotação.
Além disso, o mundo deve poder, opcionalmente, girar em torno do
eixo Y global.
A projeção deve ser selecionada via checkbox, entre paralela ou
perspectiva.
As duas retas paralelas da figura abaixo e o três eixos locais do
cubo, também devem ser desenhados.
Nota: uma rotação em torno de um eixo local (em movimento) é
chamada intrínseca
e em torno de um eixo global (estático), extrínseca.
Uma matriz de rotação intrínseca é a inversa (transposta) da matrix
de rotação extrínseca e vice-versa.
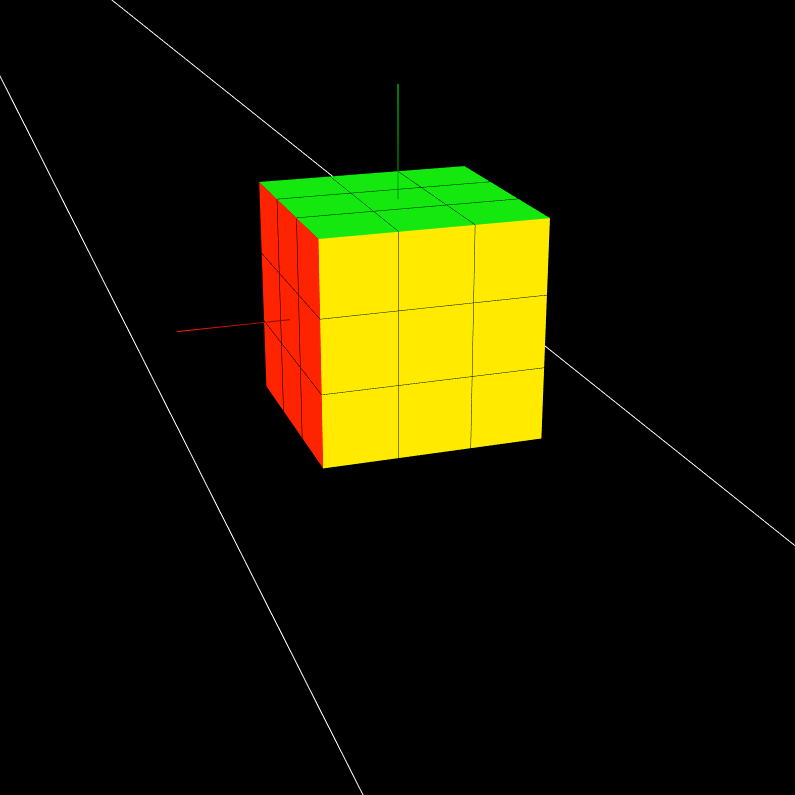
Cubo com projeção Perspectiva. |
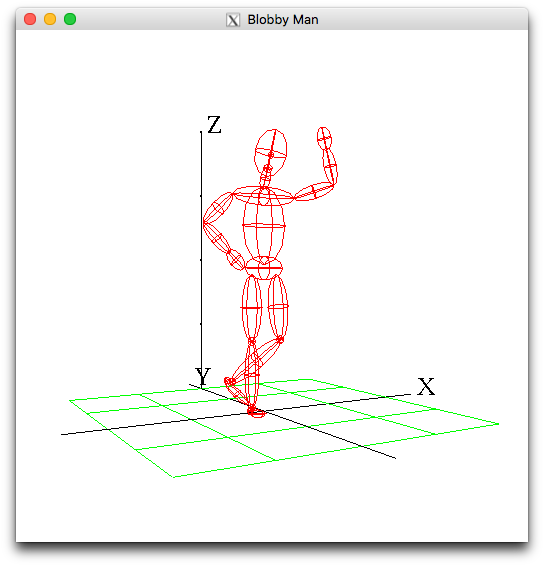
3) Implemente a hierarquia do robô do livro do Foley: corpo, cabeça, tronco, braço, ante-braço, mão, perna e pé.
Dica: utilize um cubo ou uma esfera para criar todas as partes do corpo do robô.

4) Utilize o three.js para criar uma cena com o tema de sua escolha. Devem ser utilizados no mínimo meia dúzia de objetos diferentes, incluindo uma hierarquia, uso de textura e skybox, e algum tipo de animação. Considere também a adição de áudio e sistemas de partículas.
Dica: prepare uma apresentação powerpoint, pois este trabalho deverá ser apresentado em sala de aula.

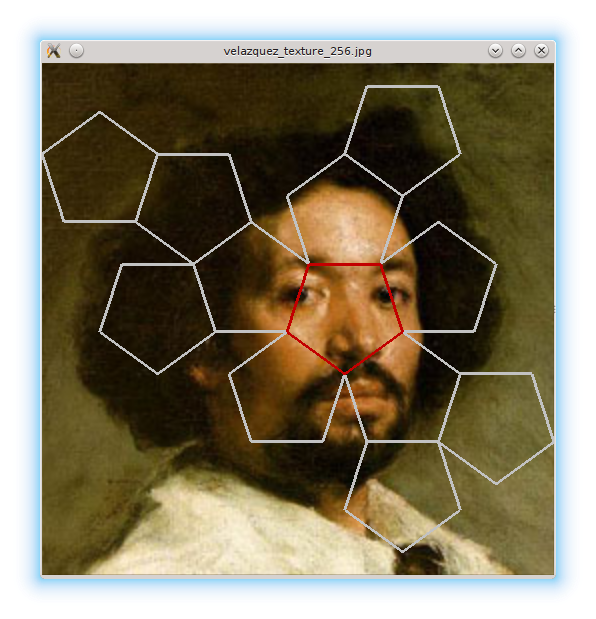
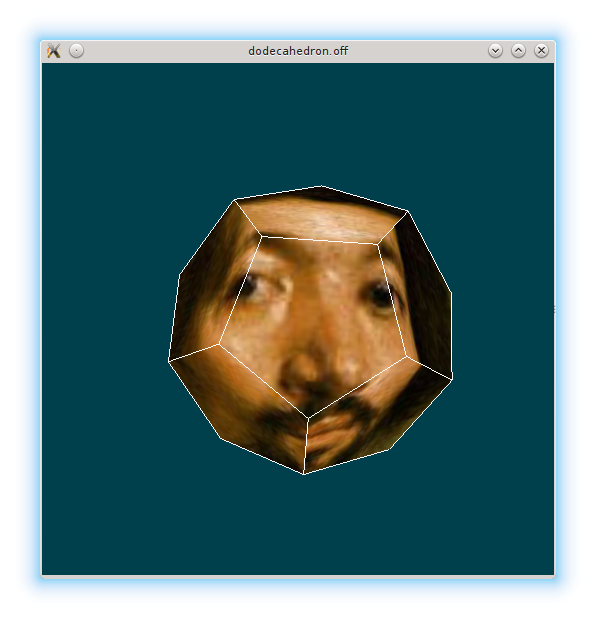
5) O objetivo deste trabalho é atribuir coordenadas de textura aos vértices dos sólidos Platônicos (poliedros perfeitos): tetraedro, cubo, octaedro, dodecaedro e icosaedro.
Para isso, deve-se selecionar uma face do poliedro com o mouse, e
rotacionar todas as outras,
de forma que fiquem coplanares com a face selecionada. Depois é só
mapear o poliedro aberto no plano da textura (z=0).
As faces podem ser percorridas em qualquer ordem, sem repetição.
Modelando os poliedros como grafos,
qualquer caminhamento serve, por exemplo, em profundidade ou
amplitude.
Dicas:
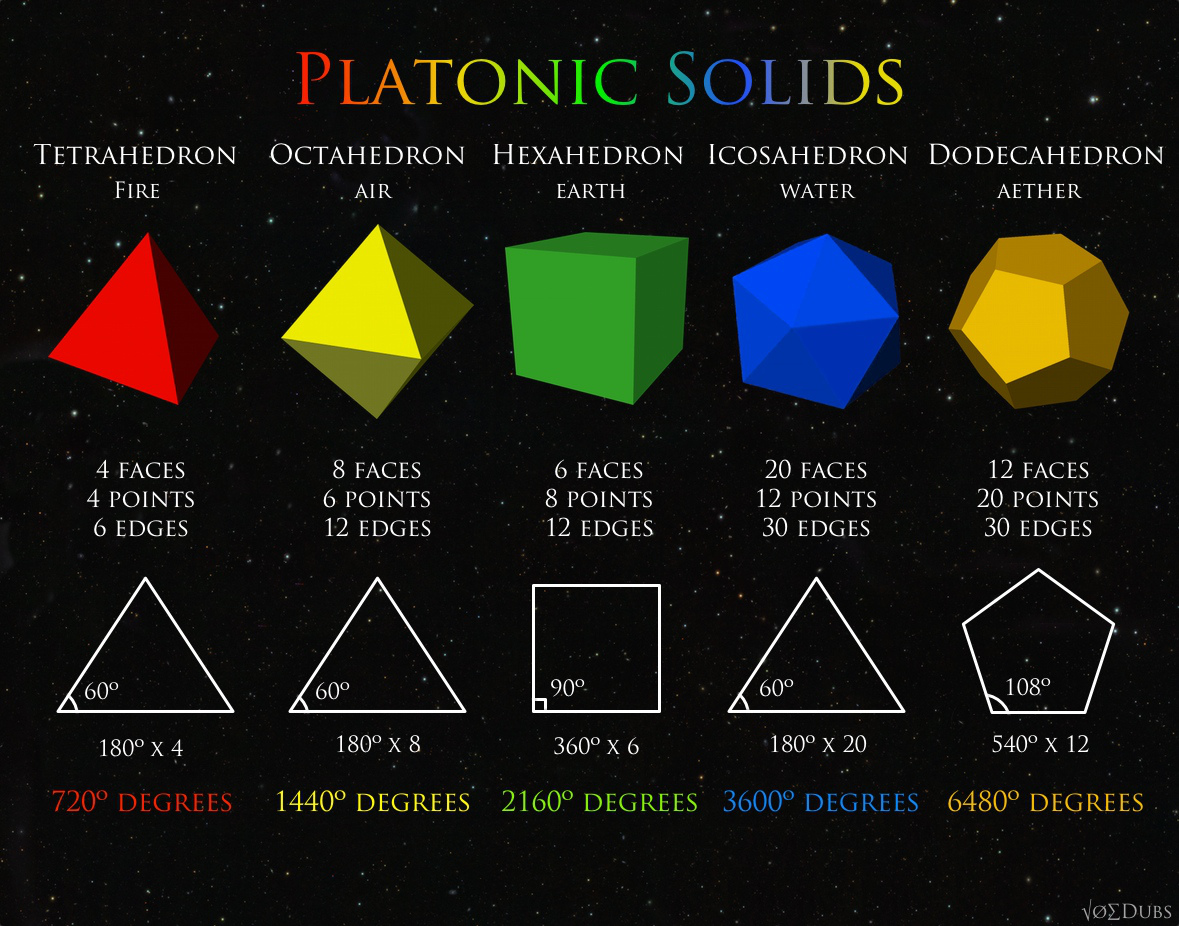
Sólidos Platônicos.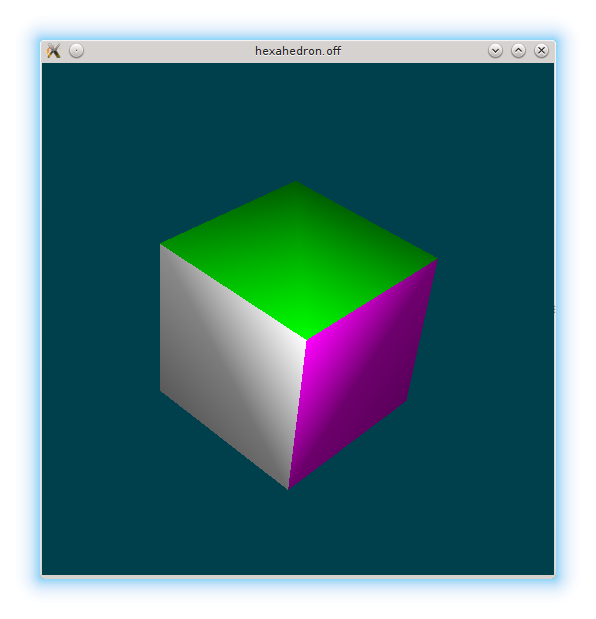
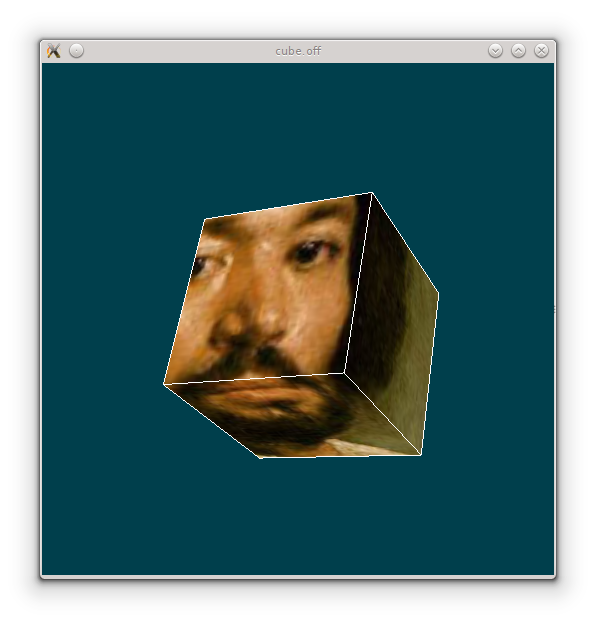
Cubo.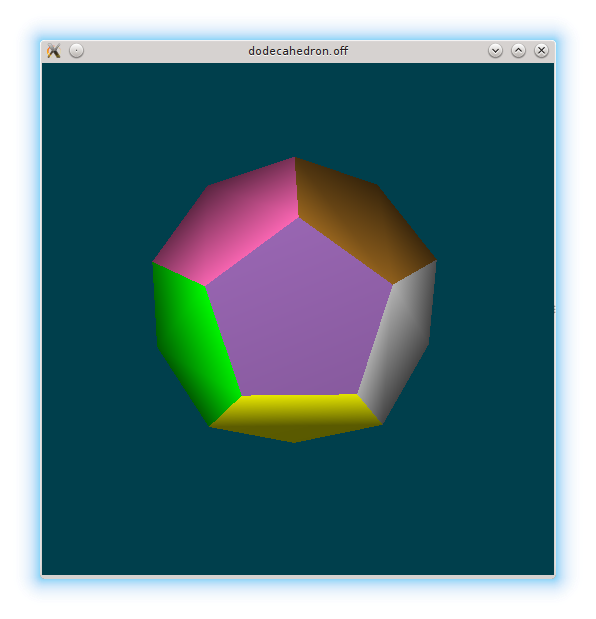
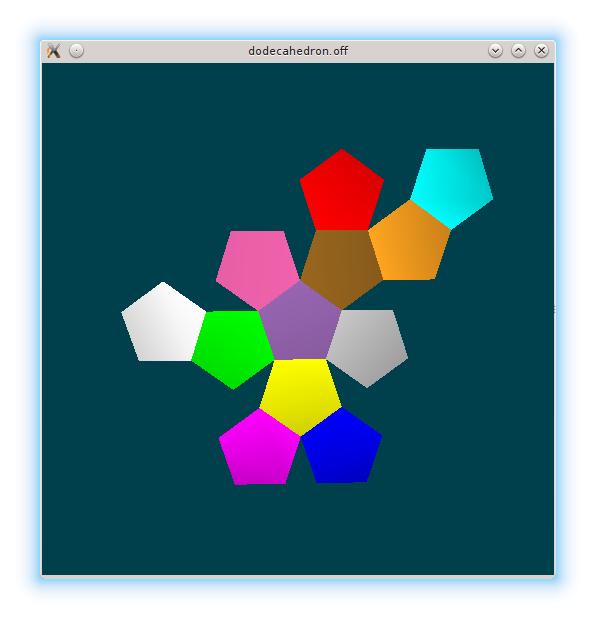
Dodecaedro.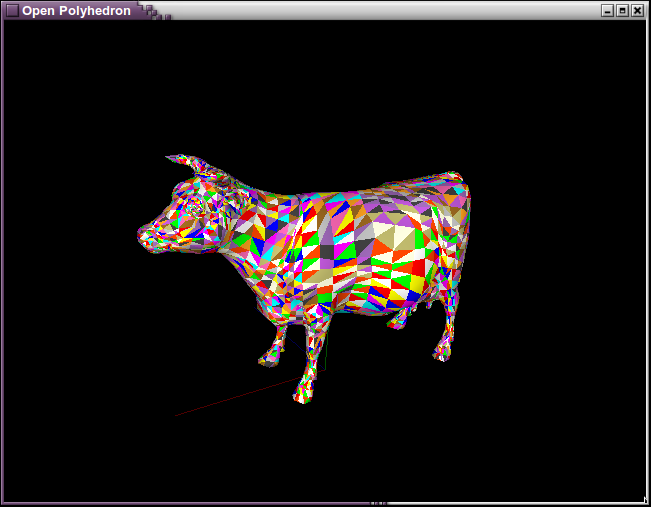
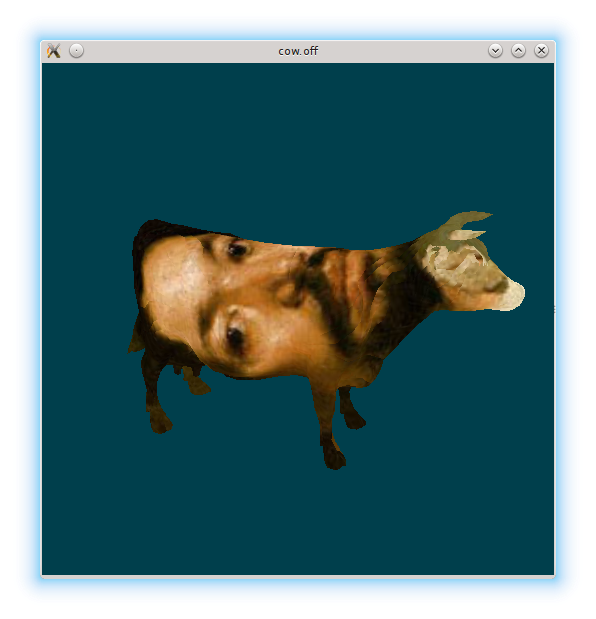
Vaca. |
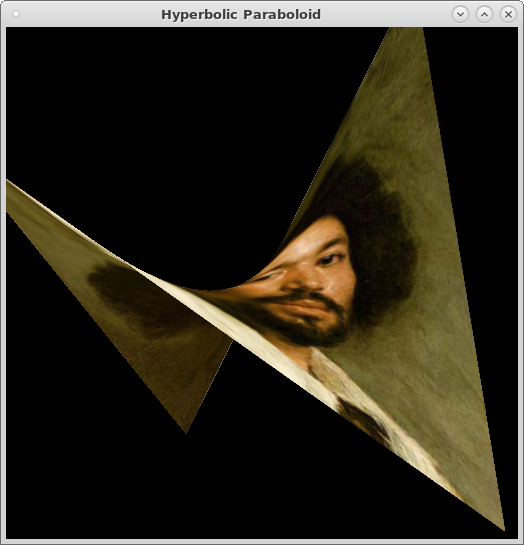
6) Implemente em OpenGL, WebGL, ou em python com PyOpenGL e numpy, um visualizador e texturizador de quádricas:
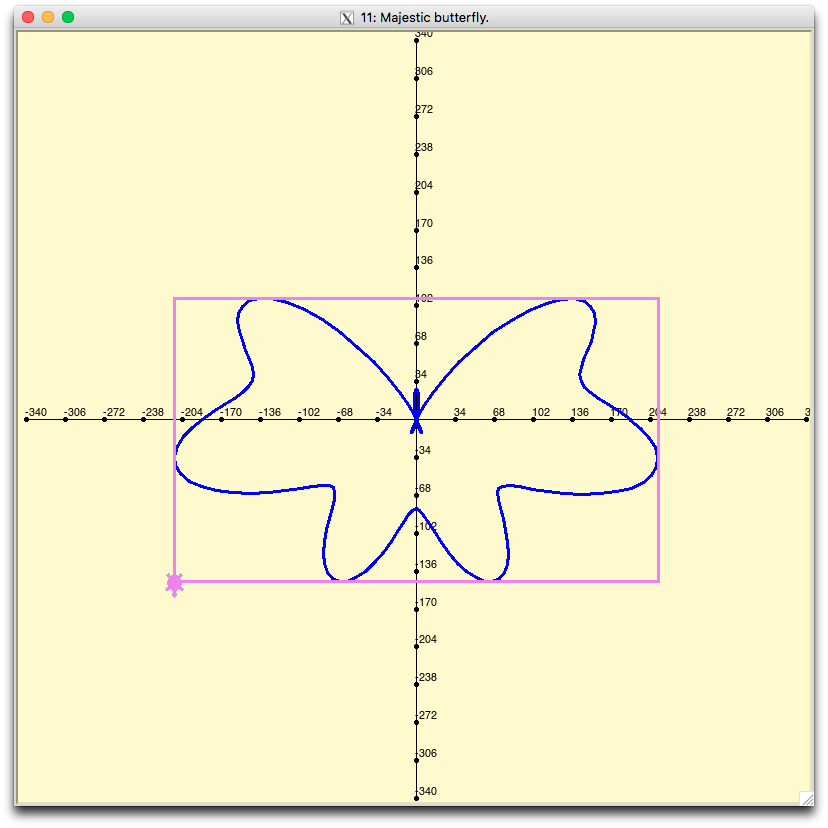
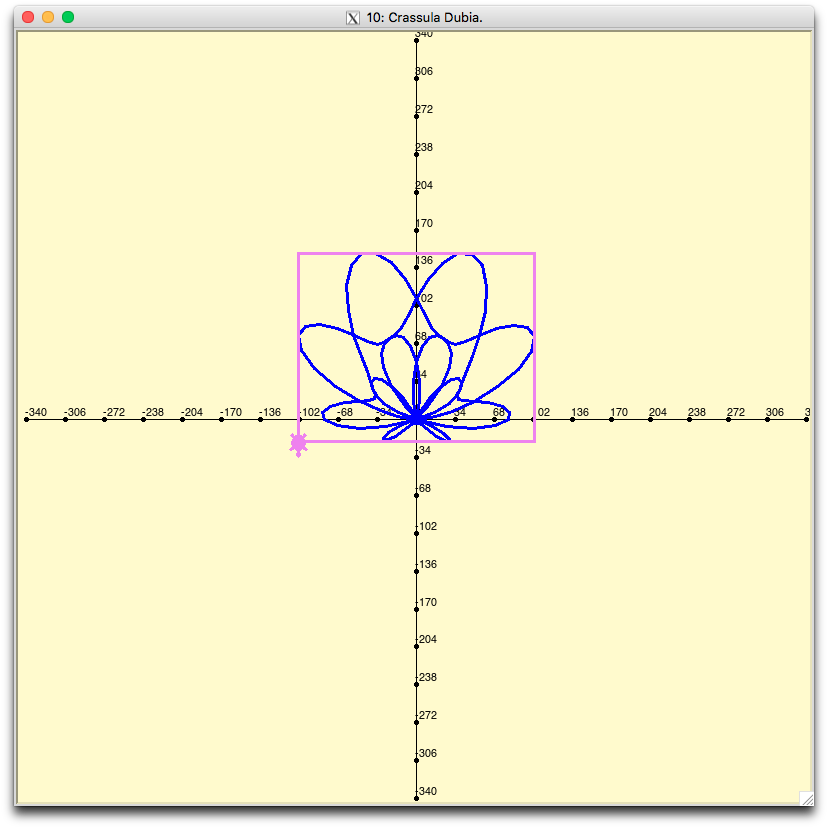
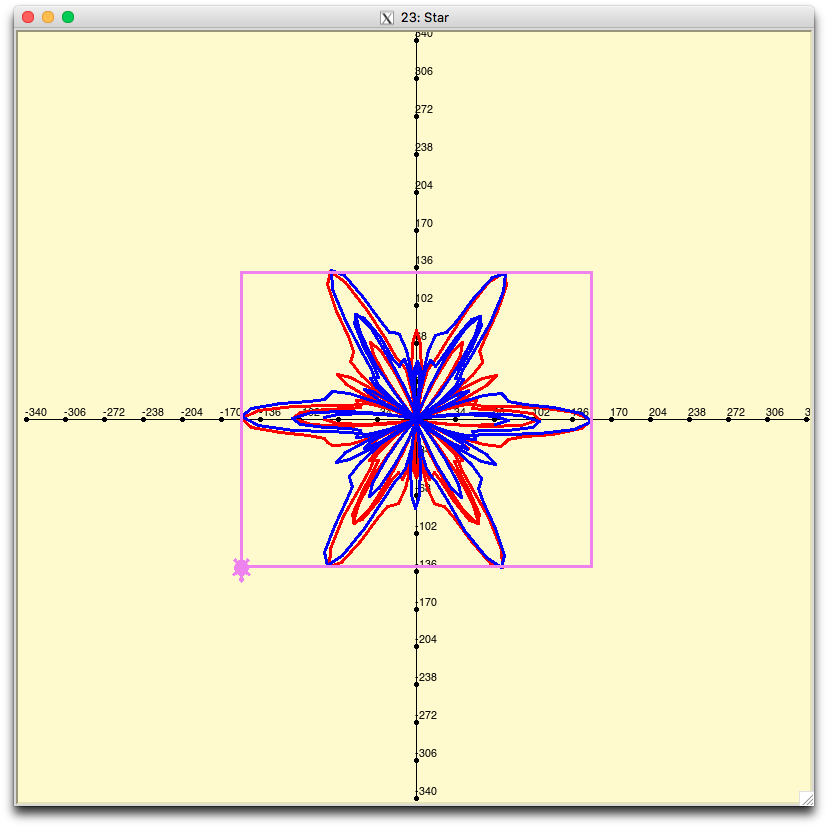
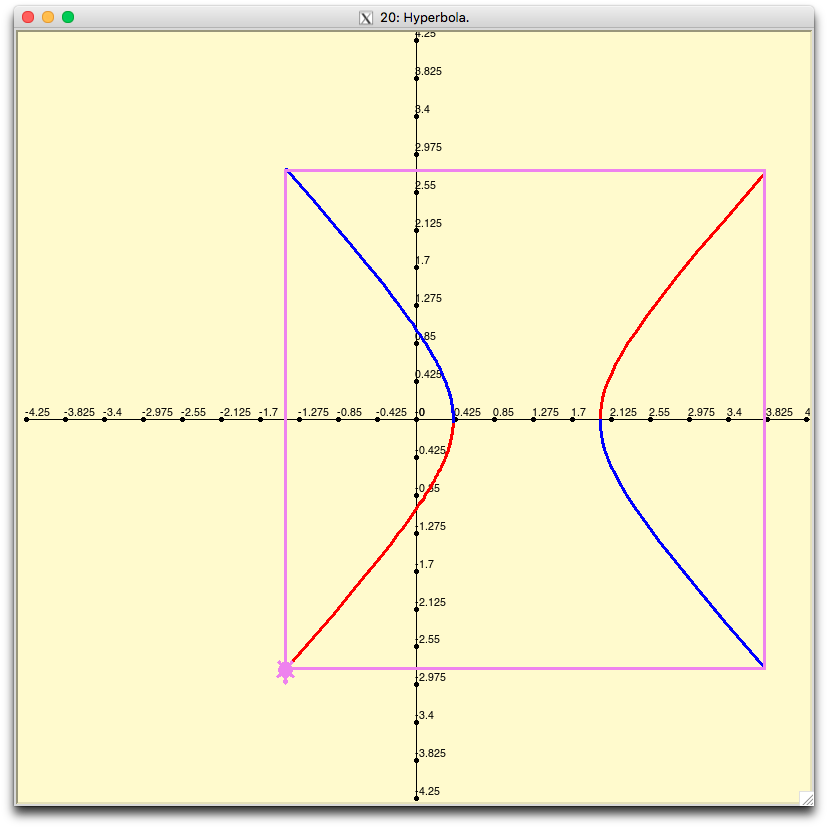
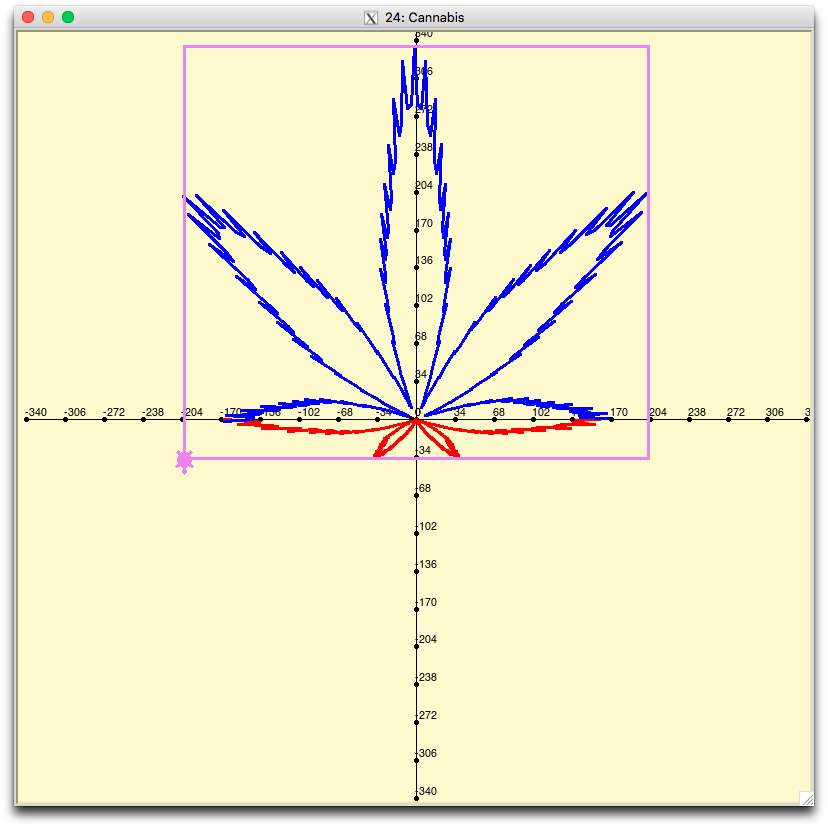
7) Implemente com o auxílio do Turtle Graphics em python, um visualizador 2D de curvas paramétricas em coordenadas polares. Use apenas os comandos para andar para frente ou para trás, levantar ou abaixar a caneta, e virar à direita ou esquerda.
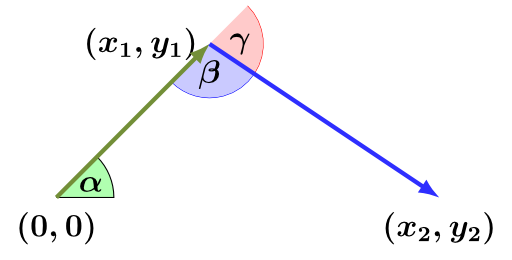
Ângulos entre pares de segmentos. |
São mantidos três pontos: (x0,y0), (x1,y1), (x2,y2).
(x0,y0) → (x1,y1) é o segmento anterior.
(x1,y1) → (x2,y2) é o segmento corrente.
Primeiramente, calculamos o ângulo γ entre estes dois segmentos, usando o produto escalar:
c = cos(γ) = (x1−x0,y1−y0) / √ (x1−x0)2 + (y1−y0)2 ⋅ (x2−x1,y2−y1) / √ (x2−x1)2+(y2−y1)2
= ((x1−x0)∗(x2−x1) + (y1−y0)∗(y2−y1)) / √ ((x1−x0)2+(y1−y0)2) ((x2−x1)2+(y2−y1)2)
γ = acos(min(max(c,−1),1)),
para que a tartaruga faça uma curva para direita ou esquerda,
de acordo com o sinal do produto vetorial entre os dois segmentos:
(x1−x0,y1−y0) × (x2−x1,y2−y1) = (x1−x0) ∗ (y2−y1) − (y1−y0) ∗ (x2−x1)
< 0 → curva para direita
> 0 → curva para a esquerda
Então, a tartaruga move-se para frente, percorrendo uma distância igual
ao comprimento do segmento corrente:
√ (x2−x1)2+(y2−y1)2 .
Para o primeiro ponto, precisamos do ângulo α ∈ [0,2π] entre o eixo x e o vetor (x1−x0,y1−y0):
α = atan2(y0−y1,x0−x1) + π
atan2(y,x) → α ∈ [−π,π]
atan2(−y,−x) + π → α ∈ [0,2π]
Todas as equações são multiplicadas por um fator de escala, para que seja possível controlar os valores das coordenadas.
Desse modo, deve-se ajustar as coordenadas do mundo no Turtle
Graphics, para que as curvas sejam desenhadas
sempre com o mesmo tamanho.
8) Implemente com o auxílio do componente canvas do tkInter do python, um visualizador de sólidos platônicos.





Use como base o código postado no Active State Code, nos links
abaixo.
Porém, algumas modificações devem ser realizadas, haja vista que o
código é muito simples.
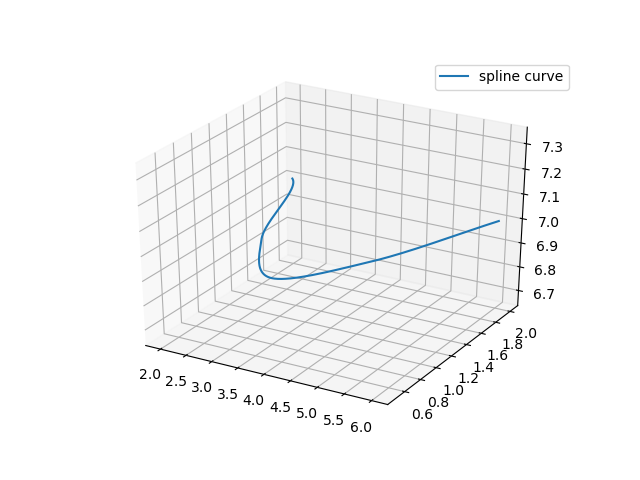
9) Implemente um gerador e visualizador de curvas de forma livre. No mínimo ele deve suportar curvas de Bézier, Hermite, Splines e Catmulll-Rom splines.
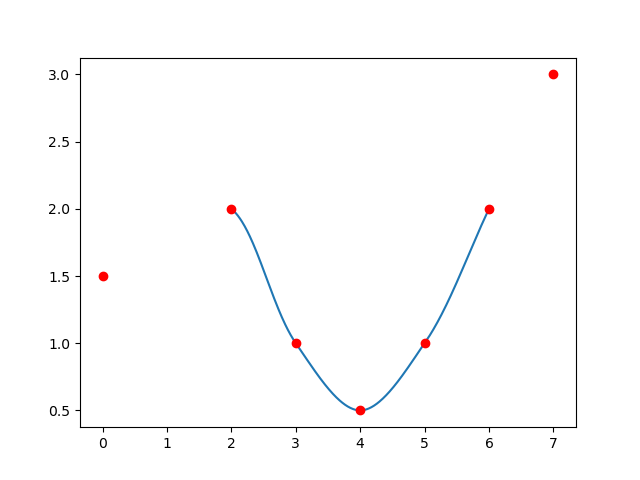

Catmull-Rom Spline. |
A sua implementação pode ser escrita em JavaScript com WebGL, Python com pyOpenGL ou C/C++ com openGL.
/Paulo Roma.